the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 24 Jan 2023
| 24 Jan 2023
Magnetopause as conformal mapping
Yasuhito Narita
Simon Toepfer
Daniel Schmid
An axi-symmetric two-dimensional magnetopause model is constructed by making use of the conformal mapping in the complex plane. The model is an analytic continuation of the power-law damped (or asymptotically elongated) parabolic shape. The complex-plane expression of the magnetopause opens the door to properly map the magnetopause and magnetosheath coordinates from one model to another.
- Article
(1499 KB) - Full-text XML
- BibTeX
- EndNote





The magnetopause model proposed by Shue et al. (1997) (hereafter the Shue model) is, to the authors' knowledge, one of the most successful structure models in space science. The Shue model can be given in a simple analytic way by combining a parabolic shape with a power law, and has successfully been tested against the magnetopause of the Earth and the other planets, such as Mercury (Winslow et al., 2013).
Here we report our finding that the magnetopause model can be formulated as a conformal mapping in the complex plane. This mapping preserves local angles. Any analytic function satisfies the conformal (angle-preserving) character in the complex plane as long as there is a non-zero derivative. Expression of the magnetopause as a conformal map is ideal when dealing with different magnetopause models.
Our study is motivated to fill the gap between the property of the bow shock models and that of the magnetopause models. The bow shock is often modeled as a conic section (either as a parabola or as a hyperbola; see Cairns et al., 1995), and the analytic expression for the conformal map is known (Darboux, 1887; Sauer and Szabó, 1967; Encyclopedia of Mathematics, 2020). The magnetopause shape (such as in the Shue model) is, on the other hand, not a conic section, and the existence of conformal mapping remained a question for a long time. We tackle the question by incorporating various conformal mappings.
We start with the magnetopause model in polar coordinates after Shue et al. (1997),
where R is the radial distance to the planet, θ is the zenith angle (measured from the planet center), and α is the power index to designate the magnetopause shape in the tail region, e.g., a parabolic shape (corresponds to α=1), an elongated shape (given by ), or damped, converging shape (). Rmp denotes the magnetopause stand-off distance at the subsolar point. In our work, we choose α=0.5, which is statistically representative (Shue et al., 1997).
By introducing the transformation,
the magnetopause location is given in the Cartesian form as
The derivation of Eq. (4) is shown in Appendix. Note that x and y are normalized to the magnetopause stand-off distance Rmp for simplicity. The magnetopause model (Eq. 4) has the following boundary conditions and asymptotic behavior:
-
The stand-off distance is restored at the subsolar point, i.e., x=1 at y=0.
-
The distance to the planet is at the terminator (x=0).
-
The distance to the Sun–Earth axis (or the x axis in geocentric solar ecliptic coordinates, GSE) is , when x→∞.
Now we express Eq. (4) in the complex plane using the variable , so that the magnetopause location is given as
In other words,
in the Cartesian representation. The complex-valued function f(z) is an extension of the magnetopause location. The magnetopause is restored when choosing (or vmp to be evaluated as when not normalized). The task is thus to find the suitable function f(z).
To our task, we first transform the y coordinates onto the imaginary axis as iy (where i is the imaginary unit), so that the denominator in Eq. (4) is formulated from into . Now we perform the analytic continuation of the right-hand side of Eq. (4), and replace iy by z.
We find out that the combination of four sequential conformal mappings is a reasonable analytic continuation of the magnetopause model: (t1) square transformation, (t2) Joukowsky transformation (with shift), (t3) square root transformation, and (t4) scaling and shifting (for the matching with the boundaries). Each transformation is discussed below.
2.1 Square transformation
In the first conformal mapping, the square transformation is used with a unit coefficient and no shift. The transformation is expressed as
The transformation yields the parabolic coordinates as
which can be arranged into a parabolic equation when eliminating u as
In fact, the parabolic model of magnetopause is introduced by Kobel and Flückiger (1994), which is equivalent to the following transformation:
Here, v=vmp corresponds to the magnetopause location. Figure 1 in the top left panel displays the mapping of u=const lines (in gray) and v=const lines (in black) for the transformation t1. The “nose” of magnetopause is located on the negative x side.

Figure 1Constant u lines (in gray) and constant v lines (in black) for the conformal mappings t1, t2, t3, and t4.
2.2 Shifted Joukowsky transformation
In the second conformal mapping, the parabolic shape of the mapped curves are stretched using the poles at . The transformation is a variant of the Joukowsky transformation, which deforms circles into ellipses (Joukowsky, 1910). We perform the Joukowsky transformation by retaining the pole terms z2+4 as
Figure 1 in the top right panel displays the mapping for the transformation t2. The overall structure of v=const lines still retains the parabolic shape, but the focal point shifts to a larger value of x, and the distance from the x axis (the y=0 line) is larger.
2.3 Shifted square root transformation
In the third conformal mapping, the Joukoswky-transformed function t3 is compared to the magnetopause model (Eq. 4). The comparison yields a subtraction by 4 and a square root operation as
Again, the poles are retained in this transformation. The mapped function has a shape of magnetopause, but the focal point is located in the far tail region, and the distance to the magnetopause is smaller than the stand-off distance. Figure 1 in the bottom left panel displays the mapping for the transformation t3. The tail shape is elongated by this transformation The focal point is moved close to the origin.
2.4 Scaling and shifting
In the final conformal mapping, the mapping is scaled by a factor a and also shifted by an offset of f0. The transformation reads as
where the scale factor is determined by the asymptotic behavior in the tail (distance of 2Rmp to the axis), and the shift is determined by the stand-off distance at the subsolar point. Combining the four transformations, the scalable magnetopause shape is expressed as a conformal mapping with
Figure 1 in the bottom right panel displays the mapping for the transformation t4. The magnetopause nose is flipped to the positive x side. and is scaled to match the magnetopause asymptotic behavior in the tail, and the lines are shifted by f0 along the x axis to meet the stand-off distance.
2.4.1 Magnetopause location
The magnetopause location is restored when choosing v=1 in . It is also worth noting that the function obtained by the transformation t3 for v=1 can analytically be evaluated as
which is used to determine the scale factor a and the shift f0 in the transformation t4 by comparing with the square of f(z) as
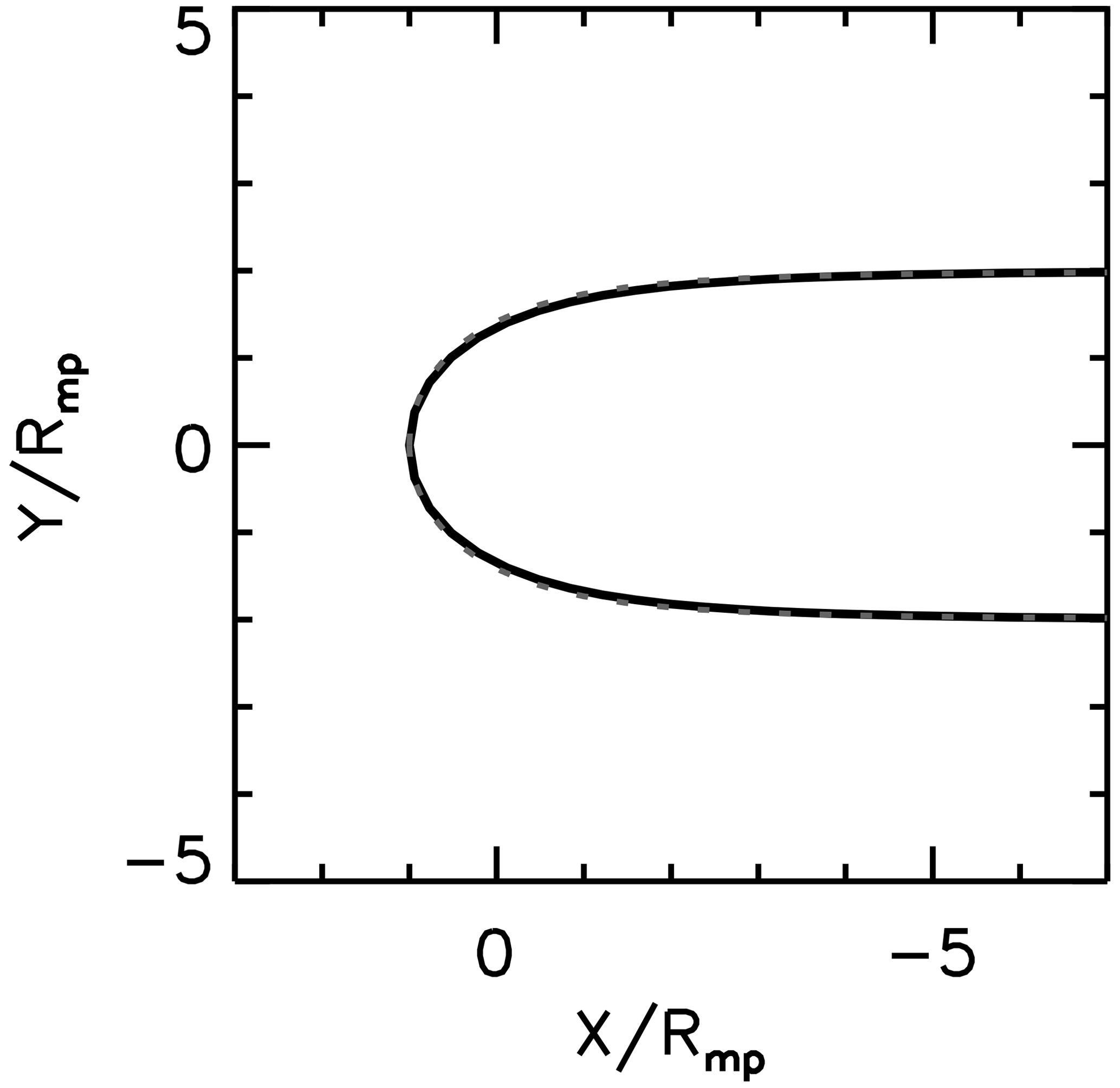
3.1 Accuracy check
The function using Eq. (16) at v=1 overall reproduces the shape of the Shue model. Figure 2 shows the comparison between the magnetopause model using Eq. (16) and the Shue model. The subsolar point (x=1 at y=0) and the asymptotic behavior ( at ) are reproduced as well. However, it should be noted that the difference occurs from the Shue model at the terminator (x=0). Our function shows the magnetopause distance at the terminator at , which is slightly underestimating that of the Shue model, . The difference between the two models is about 4.7 %. This mismatch indicates that the analytic continuation is not exact but is of approximate nature. Thus, care should be exercised when working on the magnetopause around the terminator with our conformal mapping.
3.2 Curvilinear grid generation
The analytic nature of our function (Eq. 16) can be used for the curvilinear grid generation around the magnetopause for various numerical studies. Figure 3 displays the curvilinear grid generated by Eq. 16) for values of (the C-shaped curves) and (radial to the planet or perpendicular to the x axis). The curves of constant u values are orthogonal to that of constant v values. This property comes from the fact that Eq. (16) is an analytic function, which is one of the solutions of the Laplace equation. In other words, Eq. (16) solves the Laplace equation for the given magnetopause position (imposed by v=1).
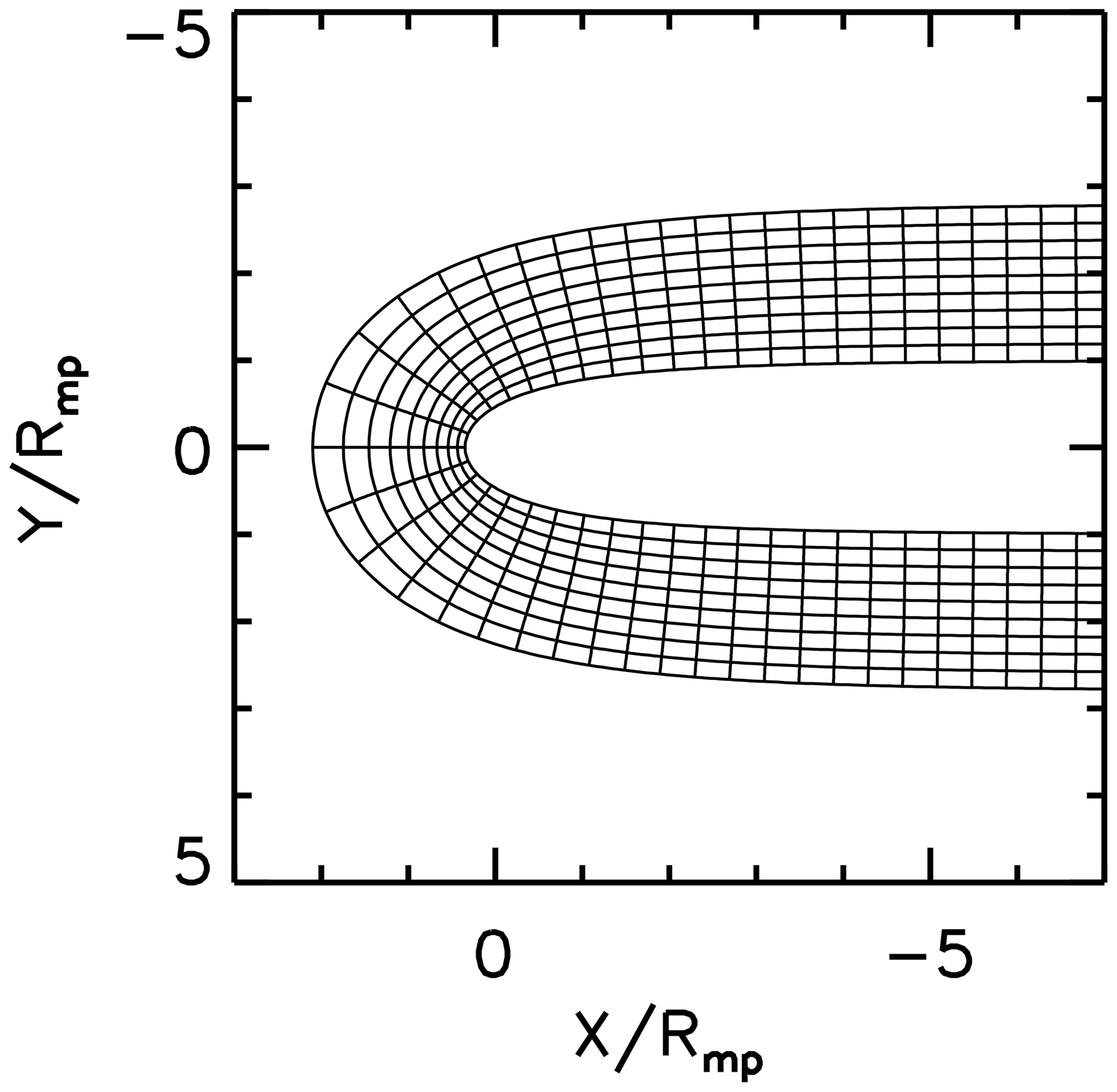
Figure 3Curvilinear grids generated by the conformal map (Eq. 16) around the magnetopause (v=1). The C-shaped curves represent lines of constant v values. The innermost curve corresponds to a line of v=0.5. The v value for the curves are shifted as 0.5, 0.7, …, 1.4 (10 curves are shown). The radial curves represent constant u values, and the curves are orthogonal to the curves of v values. The subsolar direction Y=0 is given by u=0. The curves are plotted for u values of 0, 0.2, 0.4, …, 4.4 (45 curves are shown).
3.3 Variation of tail shape
Qualitatively speaking, different tail shapes can also be obtained by generalizing the square root operation in t3 into a power with the index α as
The magnetopause coordinates are plotted as grids for α of 0.2, 0.4, 0.6, and 0.8 in Fig. 4 by using the scale factor and the shift in t4. A converged tail shape is obtained for α<0.5 and a divergent tail shape for α>0.5, which is in agreement with the Shue model (Eq. 1).
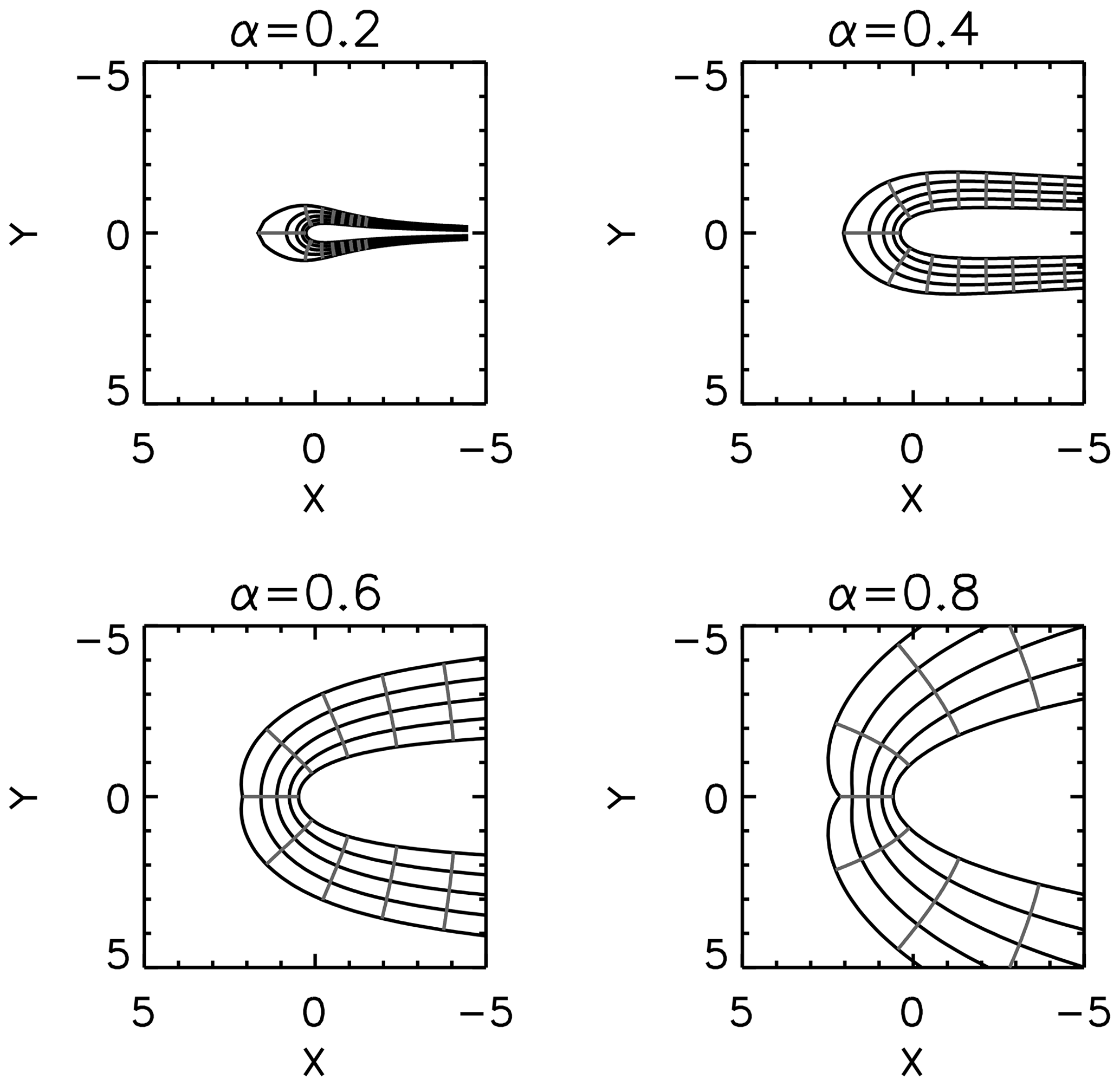
Figure 4Magnetopause grids generated for different values of the power index α in transformation. Values of u are 0.6 (innermost C-shaped curve), 0.8, …, 1.4 (outermost curve).
Conformal mapping is a useful method in the model construction when the axi-symmetry holds and the boundary is modeled in the two-dimensional spatial domain. Our magnetopause model completes the scenario that both dayside boundaries (bow shock and magnetopause) can be modeled by conformal mapping, which opens the door to analytically or semi-analytically map the magnetosheath scalar potential by Kobel and Flückiger (1994) and the set of velocity potential and stream function by Guicking et al. (2012) onto a more realistic magnetosheath domain (cf. Soucek and Escoubet, 2012).
The easiest approach of magnetosheath coordinate mapping would be to introduce the transfinite interpolation in the complex plane. Or, one could numerically solve the Laplace equation for the given boundaries in order to generate strictly orthogonal curvilinear coordinates.
In the case of α=0.5, the magnetopause position in the Shue model is given by
where ℓ=2. Equation (A1) is transformed using the conversion rule in Eqs. (2) and (3) into the following normalized form:
where . After squaring and exchanging r with , Eq. (A2) is expressed as
We compute square of in Eq. (A3) and obtain
which can be arranged into a fourth-order algebraic equation with respect to y as
The factorized form of Eq. (A5) reads
Equation (A6) delivers the Cartesian representation of the Shue model in a convenient form (Eq. 4).
No code or data were used in this paper.
YN, ST, and DS developed the idea of conformal mapping applications, checked mathematics, and wrote the manuscript. YN prepared the figures. All authors listed have made a substantial, direct, and intellectual contribution to the work and approved it for publication.
The contact author has declared that none of the authors has any competing interests.
Publisher’s note: Copernicus Publications remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This paper was edited by Elias Roussos and reviewed by one anonymous referee.
Cairns, I. H., Fairfield, D. H., Anderson, R. R., Carlton, V. E. H., Paularenas, K. I., and Lazarus, A.: Unusual locations of Earth's bow shock on 24–25 September 1987: Mach number effects, J. Geophys. Res., 100, 47–62, 1995. https://doi.org/10.1029/94JA01978 a
Darboux, G.: Leçons sur la théorie générale des surfaces et ses applications géométriques du calcul infinitésimal, Gauthier-Villars, Paris, https://gallica.bnf.fr/ark:/12148/bpt6k77831k.image (last access: 20 January 2023), 1887. a
Encyclopedia of Mathematics: European Mathematical Society, EMS Press, https://encyclopediaofmath.org (last access: 20 January 2023), 2020. a
Guicking, L., Glassmeier, K.-H., Auster, H.-U., Narita, Y., and Kleindienst, G.: Low-frequency magnetic field fluctuations in Earth's plasma environment observed by THEMIS, Ann. Geophys., 30, 1271–1283, https://doi.org/10.5194/angeo-30-1271-2012, 2012. a
Joukowsky, N. E.: Über die Konturen der Tragflächen der Drachenflieger, Zeitschrift für Flugtechnik und Motorluftschifffahrt, 1, 281–284, 1910 (also 3, 81–86, 1912). a
Kobel, E. and Flückiger, E. O.: A model of the steady state magnetic field in the magnetosheath, J. Geophys. Res., 99, 23617–23622, https://doi.org/10.1029/94JA01778, 1994. a, b
Sauer, R. and Szabó, I.: Mathematische Hilfsmittel des Ingenieurs, Springer Berlin, Heidelberg, https://link.springer.com/book/9783642949913 (last access: 20 January 2023), 1967. a
Shue, J.-H., Chao, J. K., Fu, H. C., Russell, C. T., Song, P., Khurana, K. K., and Singer,H. J.: A new functional form to study the solar wind control of the magnetopause size and shape, J. Geophys. Res.-Space, 102, 9497–9511, https://doi.org/10.1029/97JA00196, 1997. a, b, c
Soucek, J. and Escoubet, C. P.: Predictive model of magnetosheath plasma flow and its validation against Cluster and THEMIS data, Ann. Geophys., 30, 973–982, https://doi.org/10.5194/angeo-30-973-2012, 2012. a
Winslow, R. M., Anderson, B. J., Johnson, C. L., Slavin, J. A., Korth, H., Purucker, M., Baker, D. N., and Solomon, S. C.: Mercury's magnetopause and bow shock from MESSENGER Magnetometer observations, J. Geophys. Res.-Space, 118, 2213–2227, https://doi.org/10.1002/jgra.50237, 2013. a